Из-за развития современных технологий и жизненных потребностей людей требования к чувствительностиGPS-локаторприемники постепенно увеличиваются. В конце концов, когда в локатор встроен приемник с более высокой чувствительностью, независимо от того, находится ли он под высоким зданием или узкой улицей, он будет получать временные эфемериды и информацию о местоположении в кратчайшие сроки, что значительно сокращает затраты времени на холодный запуск. и теплый старт.
Для общей производительностиGPS-локаторчувствительность приемника является очень важным эталонным показателем. Каждый производитель модулей позиционирования и научно-исследовательская компания будут рассматривать чувствительность приемника как вычислительную эффективность процессора мобильного телефона. Насколько это важно. Чувствительность приемника в основном делится на три категории: первая категория — чувствительность захвата, вторая категория — чувствительность отслеживания, а третья категория — чувствительность начального запуска. Чувствительность наиболее часто используемого приемника-локатора обычно контролируется на уровне -160 дБм, в то время как исходное значение чувствительности при запуске и значение чувствительности захвата приемника находятся ниже -142 дБм и -148 дБм.
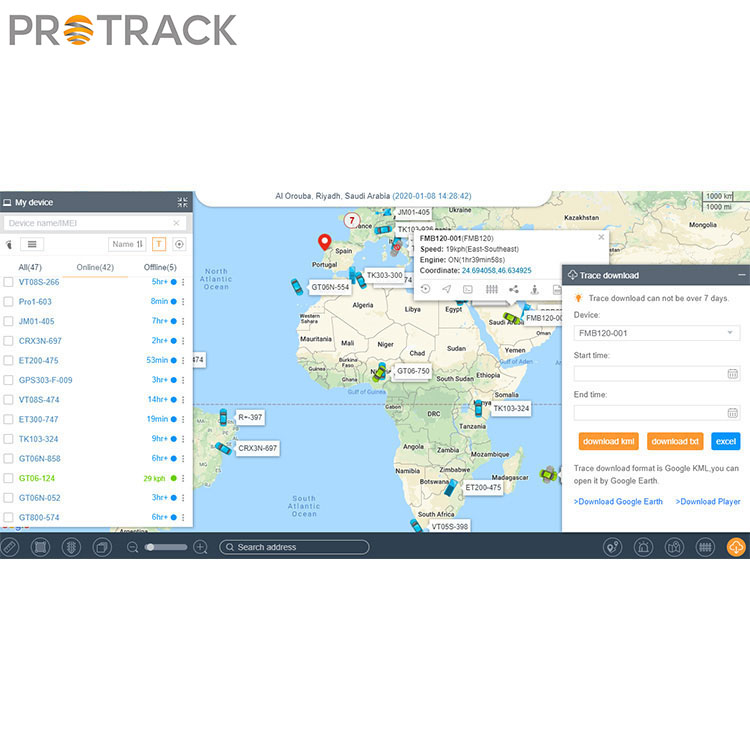
При первом использовании автомобильного локатора мы подключим автомобильный локатор к источнику питания автомобиля, затемGPS-локаторприемник начнет работать, он в основном захватывает спутниковый сигнал и запускается при захвате спутникового сигнала. Уменьшите энергопотребление, отслеживайте спутниковые сигналы и отслеживайте маршруты движения транспортных средств в режиме реального времени. Помимо информации о местоположении, другие типы локаторов также будут получать и отправлять короткие тексты GPS и обновлять данные о времени. Например, портативный терминал позиционирования, система позиционирования дронов и т. д.
С точки зрения рабочей системы и процесса системы позиционирования GPS, путь сигнала, параметры шума и алгоритм основной полосы частот связи переднего конца приемника локатора будут влиять на различную чувствительность приемника. Что касается параметров шума, лучше всего оптимизировать значение G/T системы. Таким образом, коэффициент шума можно постепенно снизить. Конечно, коэффициент усиления полного канала не может быть слишком большим. Наконец, разработка алгоритма основной полосы частот связи. На данный момент многие производители базовой полосы GPS-связи и научно-исследовательские компании выпустили чипы базовой полосы GPS. Был обработан.